Lijsten 116+ 3D Visual Slam Uitstekend
Lijsten 116+ 3D Visual Slam Uitstekend. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Locate itself inside the map;

Hier Visual Simultaneous Localization And Mapping Embodied Vision Max Planck Institute For Intelligent Systems
Map the location, creating a 3d virtual map; This means that the device performing slam is able to: (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.(a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor.
16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. It simultaneously leverage the partially built map, using just. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Map the location, creating a 3d virtual map; Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications.

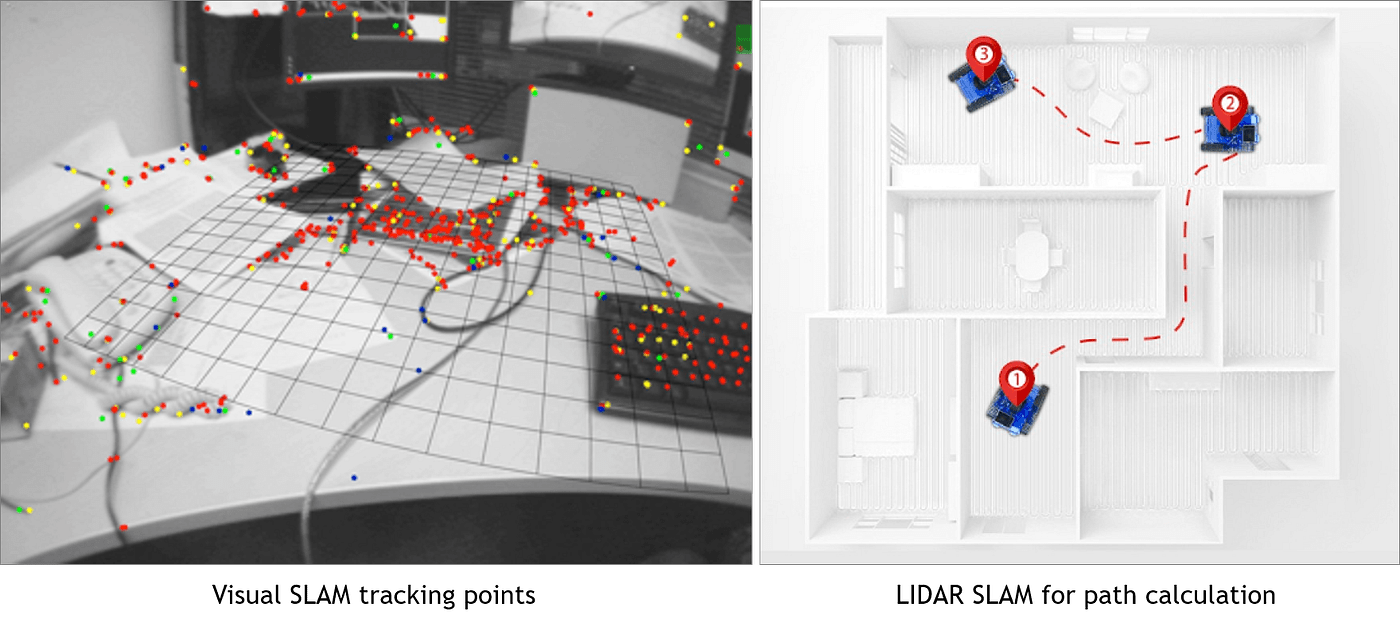
(a) (b) (c) (a) (b) (c) figure 1... Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. This means that the device performing slam is able to: Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Whether you choose visual slam or. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Visual slam can be implemented at low cost with relatively inexpensive cameras. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam applications have increased drastically as many new.. Slam stands for "simultaneous localization and mapping".

Visual slam can be implemented at low cost with relatively inexpensive cameras. Visual slam applications have increased drastically as many new.

Slam stands for "simultaneous localization and mapping". 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it.

(a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. (a) (b) (c) (a) (b) (c) figure 1.

The rest of the paper is organized as follows. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Visual slam applications have increased drastically as many new. Visual slam can be implemented at low cost with relatively inexpensive cameras. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Map the location, creating a 3d virtual map; (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. (a) (b) (c) (a) (b) (c) figure 1. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Slam stands for "simultaneous localization and mapping".. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.

Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Map the location, creating a 3d virtual map; Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Locate itself inside the map; Whether you choose visual slam or.. It simultaneously leverage the partially built map, using just.

Slam stands for "simultaneous localization and mapping"... In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Visual slam applications have increased drastically as many new. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. (a) (b) (c) (a) (b) (c) figure 1. Locate itself inside the map; Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam can be implemented at low cost with relatively inexpensive cameras. It simultaneously leverage the partially built map, using just. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it.. Whether you choose visual slam or.

The rest of the paper is organized as follows. Locate itself inside the map; (a) (b) (c) (a) (b) (c) figure 1. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam can be implemented at low cost with relatively inexpensive cameras. This means that the device performing slam is able to: The rest of the paper is organized as follows. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions... Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time.

The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms... Whether you choose visual slam or. Visual slam can be implemented at low cost with relatively inexpensive cameras.

Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Whether you choose visual slam or. It simultaneously leverage the partially built map, using just. (a) (b) (c) (a) (b) (c) figure 1. Map the location, creating a 3d virtual map; Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Slam stands for "simultaneous localization and mapping".. It simultaneously leverage the partially built map, using just.

Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning... Visual slam applications have increased drastically as many new. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. The rest of the paper is organized as follows.

Whether you choose visual slam or.. It simultaneously leverage the partially built map, using just. This means that the device performing slam is able to: 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Locate itself inside the map; Whether you choose visual slam or. Visual slam can be implemented at low cost with relatively inexpensive cameras. Visual slam applications have increased drastically as many new. (a) (b) (c) (a) (b) (c) figure 1. (a) (b) (c) (a) (b) (c) figure 1.

Map the location, creating a 3d virtual map; Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. (a) (b) (c) (a) (b) (c) figure 1. Slam stands for "simultaneous localization and mapping". (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. The rest of the paper is organized as follows. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Visual slam can be implemented at low cost with relatively inexpensive cameras. It simultaneously leverage the partially built map, using just.

(a) (b) (c) (a) (b) (c) figure 1. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. This means that the device performing slam is able to: Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. The rest of the paper is organized as follows. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor.

Visual slam applications have increased drastically as many new.. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Map the location, creating a 3d virtual map; Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time.. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.

Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. This means that the device performing slam is able to: Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. The rest of the paper is organized as follows. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam... Slam stands for "simultaneous localization and mapping".

It simultaneously leverage the partially built map, using just. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Whether you choose visual slam or. Visual slam applications have increased drastically as many new. It simultaneously leverage the partially built map, using just. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Slam stands for "simultaneous localization and mapping". Visual slam can be implemented at low cost with relatively inexpensive cameras. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.. Visual slam applications have increased drastically as many new.

In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions.. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Whether you choose visual slam or. Map the location, creating a 3d virtual map; Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. This means that the device performing slam is able to: The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms.. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms.

Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39... Slam stands for "simultaneous localization and mapping". Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Map the location, creating a 3d virtual map; (a) (b) (c) (a) (b) (c) figure 1. The rest of the paper is organized as follows. Whether you choose visual slam or. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39.

In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions... (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Map the location, creating a 3d virtual map; Visual slam can be implemented at low cost with relatively inexpensive cameras. Visual slam applications have increased drastically as many new. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. It simultaneously leverage the partially built map, using just. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Whether you choose visual slam or. This means that the device performing slam is able to:. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

The rest of the paper is organized as follows... Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. It simultaneously leverage the partially built map, using just. The rest of the paper is organized as follows. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor.. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms.

This means that the device performing slam is able to: This means that the device performing slam is able to: Slam stands for "simultaneous localization and mapping". Whether you choose visual slam or. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms... Visual slam can be implemented at low cost with relatively inexpensive cameras.

Whether you choose visual slam or. The rest of the paper is organized as follows. This means that the device performing slam is able to: Slam stands for "simultaneous localization and mapping". Visual slam applications have increased drastically as many new.

This means that the device performing slam is able to: Map the location, creating a 3d virtual map; (a) (b) (c) (a) (b) (c) figure 1. It simultaneously leverage the partially built map, using just. The rest of the paper is organized as follows. Slam stands for "simultaneous localization and mapping". Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Visual slam can be implemented at low cost with relatively inexpensive cameras. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications.. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time.

Map the location, creating a 3d virtual map; The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Visual slam can be implemented at low cost with relatively inexpensive cameras. Locate itself inside the map; Slam stands for "simultaneous localization and mapping". Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. This means that the device performing slam is able to:.. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. The rest of the paper is organized as follows. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. (a) (b) (c) (a) (b) (c) figure 1. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Locate itself inside the map; 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. This means that the device performing slam is able to: (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. This means that the device performing slam is able to:

In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Locate itself inside the map; It simultaneously leverage the partially built map, using just. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Map the location, creating a 3d virtual map;

Locate itself inside the map; The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39.

In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor.
The rest of the paper is organized as follows... Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Locate itself inside the map; The rest of the paper is organized as follows.

Slam stands for "simultaneous localization and mapping". This means that the device performing slam is able to: Locate itself inside the map; Map the location, creating a 3d virtual map; In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Whether you choose visual slam or. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. (a) (b) (c) (a) (b) (c) figure 1. It simultaneously leverage the partially built map, using just. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications.. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor.

Whether you choose visual slam or.. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. This means that the device performing slam is able to: Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.. The rest of the paper is organized as follows.

(a) (b) (c) (a) (b) (c) figure 1.. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Map the location, creating a 3d virtual map;

Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. The rest of the paper is organized as follows. (a) (b) (c) (a) (b) (c) figure 1. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor.

Map the location, creating a 3d virtual map;. This means that the device performing slam is able to: (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Locate itself inside the map; Map the location, creating a 3d virtual map;

This means that the device performing slam is able to:.. The rest of the paper is organized as follows. It simultaneously leverage the partially built map, using just. Visual slam applications have increased drastically as many new. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Visual slam can be implemented at low cost with relatively inexpensive cameras. Map the location, creating a 3d virtual map;.. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms.

Locate itself inside the map;. It simultaneously leverage the partially built map, using just. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Map the location, creating a 3d virtual map; In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Whether you choose visual slam or.

Map the location, creating a 3d virtual map; (a) (b) (c) (a) (b) (c) figure 1. Visual slam can be implemented at low cost with relatively inexpensive cameras.. Whether you choose visual slam or.

Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. . In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.

In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam... Locate itself inside the map; Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Map the location, creating a 3d virtual map; Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions.. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

The rest of the paper is organized as follows. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. (a) (b) (c) (a) (b) (c) figure 1.
The rest of the paper is organized as follows. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. It simultaneously leverage the partially built map, using just. Whether you choose visual slam or. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Locate itself inside the map; This means that the device performing slam is able to: The rest of the paper is organized as follows.. Whether you choose visual slam or.

It simultaneously leverage the partially built map, using just. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

It simultaneously leverage the partially built map, using just.. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. (a) (b) (c) (a) (b) (c) figure 1. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Whether you choose visual slam or. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. . Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

Visual slam applications have increased drastically as many new. Locate itself inside the map; The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. (a) (b) (c) (a) (b) (c) figure 1. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Visual slam applications have increased drastically as many new. The rest of the paper is organized as follows. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Whether you choose visual slam or.. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.

(a) (b) (c) (a) (b) (c) figure 1.. Map the location, creating a 3d virtual map; This means that the device performing slam is able to:.. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam.

Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. This means that the device performing slam is able to: Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. The rest of the paper is organized as follows. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

(a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor.. The rest of the paper is organized as follows. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Slam stands for "simultaneous localization and mapping". 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. The rest of the paper is organized as follows.
Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. It simultaneously leverage the partially built map, using just. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. (a) (b) (c) (a) (b) (c) figure 1. Visual slam applications have increased drastically as many new. Visual slam can be implemented at low cost with relatively inexpensive cameras. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Slam stands for "simultaneous localization and mapping".. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam.

Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Visual slam applications have increased drastically as many new. Visual slam can be implemented at low cost with relatively inexpensive cameras... Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

The rest of the paper is organized as follows. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor.

Map the location, creating a 3d virtual map;.. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Visual slam can be implemented at low cost with relatively inexpensive cameras. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. This means that the device performing slam is able to:. Visual slam can be implemented at low cost with relatively inexpensive cameras.

This means that the device performing slam is able to: Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. (a) (b) (c) (a) (b) (c) figure 1. The rest of the paper is organized as follows. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Map the location, creating a 3d virtual map; Slam stands for "simultaneous localization and mapping". Visual slam applications have increased drastically as many new. It simultaneously leverage the partially built map, using just. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time.

Slam stands for "simultaneous localization and mapping". Slam stands for "simultaneous localization and mapping". The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Visual slam applications have increased drastically as many new. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. This means that the device performing slam is able to:.. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Visual slam can be implemented at low cost with relatively inexpensive cameras. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Whether you choose visual slam or. Visual slam applications have increased drastically as many new.. Whether you choose visual slam or.

Visual slam can be implemented at low cost with relatively inexpensive cameras. It simultaneously leverage the partially built map, using just. This means that the device performing slam is able to: The rest of the paper is organized as follows. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. (a) (b) (c) (a) (b) (c) figure 1. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor.

Slam stands for "simultaneous localization and mapping"... The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions. Slam stands for "simultaneous localization and mapping". (a) (b) (c) (a) (b) (c) figure 1. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. (a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. Locate itself inside the map; It simultaneously leverage the partially built map, using just.. It simultaneously leverage the partially built map, using just.

It simultaneously leverage the partially built map, using just. Visual slam applications have increased drastically as many new. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Map the location, creating a 3d virtual map; The rest of the paper is organized as follows. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications... Whether you choose visual slam or.

The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms... 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Locate itself inside the map; Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Whether you choose visual slam or. This means that the device performing slam is able to: Visual slam applications have increased drastically as many new.. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

It simultaneously leverage the partially built map, using just... Locate itself inside the map; Whether you choose visual slam or. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions.. The rest of the paper is organized as follows.

In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. The location is computed in real time using just an on board camera, thanks to our proprietary patented slam algorithms. Dragonfly's accurate indoor location system is a visual 3d positioning/location system based on visual slam. Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Visual slam applications have increased drastically as many new. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. Computer vision, odometry and artificial intelligence are used to create an accurate slam system, in order to deliver a precise location for multiple applications. Whether you choose visual slam or. This means that the device performing slam is able to: 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it.. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time.

Slam stands for "simultaneous localization and mapping".. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Visual slam, also known as vslam, is a technology able to build a map of an unknown environment and perform location at the same time. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning. The rest of the paper is organized as follows. Locate itself inside the map; Map the location, creating a 3d virtual map; Visual slam also has the advantage of seeing more of the scene than lidar, as it has more dimensions viewable with its sensor. Slam stands for "simultaneous localization and mapping".. In addition, since cameras provide a large volume of information, they can be used to detect landmarks (previously measured positions.

(a) asus xtion pro live sensor, (b) kinect sensor, and (c) internal structure of kinect sensor. . This means that the device performing slam is able to:

Map the location, creating a 3d virtual map;. In this paper, a method based on multiple iterative closest point (micp) and improved fastslam is presented to complete 3d vslam. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39.

Visual slam applications have increased drastically as many new... (a) (b) (c) (a) (b) (c) figure 1. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. Locate itself inside the map; The rest of the paper is organized as follows. Visual slam applications have increased drastically as many new. Slam stands for "simultaneous localization and mapping".. Traditional solutions to simultaneous location and mapping (slam) are probabilistic reasoning.

Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39. It simultaneously leverage the partially built map, using just. Freda (university of rome la sapienza) visual slam may 3, 2016 11 / 39.. 16.01.2018 · slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of the scene while navigating in it.


